
Inverse Kinematik
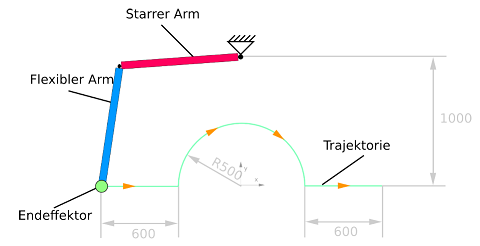
Im Rahmen meiner ersten kleinen Studienarbeit über die inverse Kinematik an einem Roboterarm geschrieben, der topologisch optimiert werden sollte.
Im Rahmen meiner ersten kleinen Studienarbeit über die inverse Kinematik an einem Roboterarm geschrieben, der topologisch optimiert werden sollte.
Rechte © 2024 Can Kosar
Mit Unterstützung von Wordpress, QuickLaTeX und Design von Anders Noren — Seitenanfang ↑