
Bei den SLAM-Robotern ist ein robustes Raumerfassungssystem von essenzieller Bedeutung. Bei den Robotern im Haushaltsbereich ist der Kostenfaktor des Raumerfassungssystems ein entscheidendes Kriterium. Die Ultraschall-Distanzmessung ist eine sehr interessante Möglichkeit, den Raum zu erfassen.
Ein analoges Ultraschallmodul für die Distanzmessung kostet bei großen Stückzahlen deutlich unter 1USD, da es eine einfache Elektronik hat und keine Präzisionsherstellung erfordert. Er kann die Objekte im Bereich  erkennen. Die 1D-Messungen müssen, abhängig von der Roboterkonfiguration, ins Inertialsystem transformiert werden, um die 2D-Raumkarte zu erstellen. Die Schnittstelle HC-SR04 mit Raspberry Pi ist im Teil Schnittstelle Raspberry Pi und HC-SR04 erläutert.
erkennen. Die 1D-Messungen müssen, abhängig von der Roboterkonfiguration, ins Inertialsystem transformiert werden, um die 2D-Raumkarte zu erstellen. Die Schnittstelle HC-SR04 mit Raspberry Pi ist im Teil Schnittstelle Raspberry Pi und HC-SR04 erläutert.
Versuchsaufbau
Der Mapping-Versuch mit Ultraschallsensoren wird in einem vorgemessenen, künstlichen Versuchsraum durchgeführt, siehe Abbildung 1.
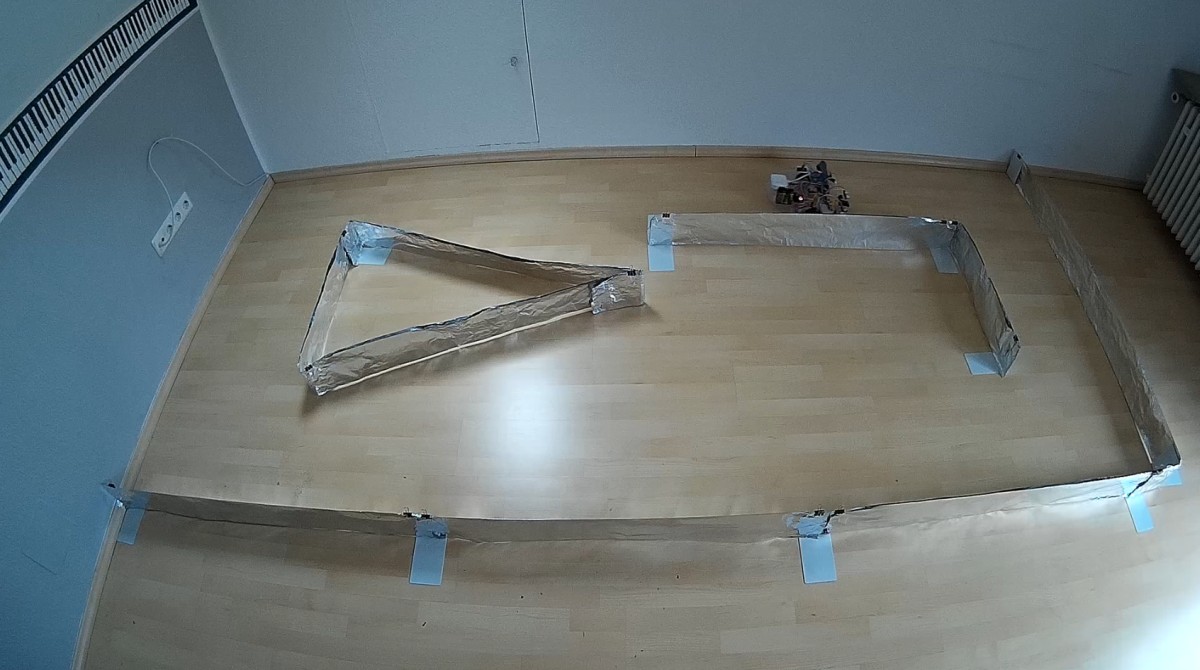
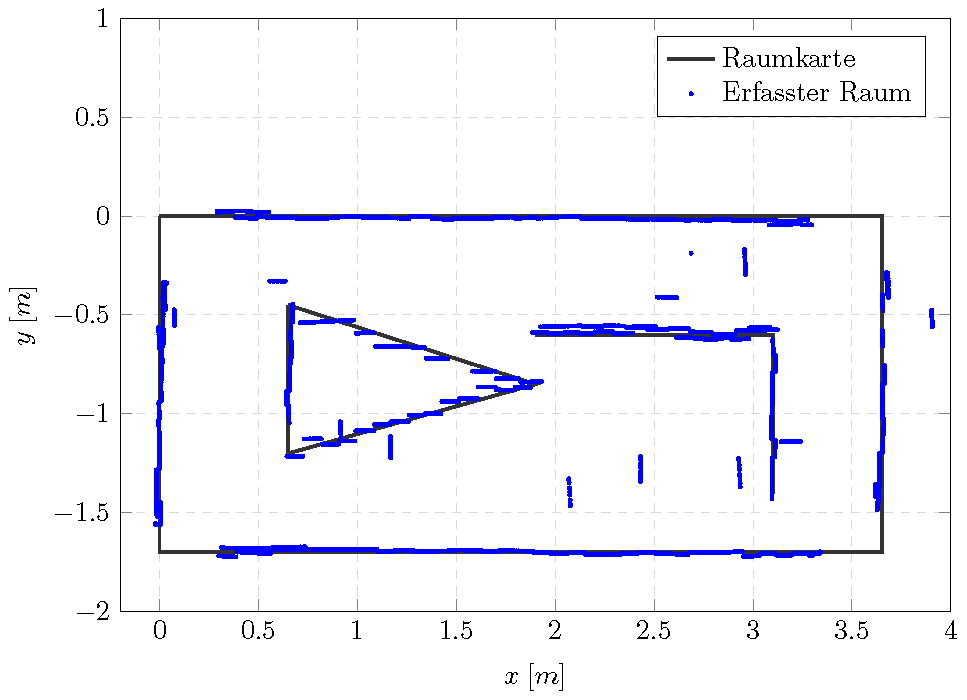
Die Außenmaße des Messraums betragen  . Der Roboter führt ein autonomes „Rechtsherumfahrt“ an den Wänden entlang und akquiritiert die 1D-Entfernungsdaten mit der aktuellen Roboterlage. Danach werden diese Daten ins Inertialsystem transformiert und es wird die Raumgeometrie erstellt. Erster Teil des Versuchs ist die einmalige Fahrt und die Interpretation der Messergebnisse. Im folgenden Video wird der Versuchsablauf vorgestellt.
. Der Roboter führt ein autonomes „Rechtsherumfahrt“ an den Wänden entlang und akquiritiert die 1D-Entfernungsdaten mit der aktuellen Roboterlage. Danach werden diese Daten ins Inertialsystem transformiert und es wird die Raumgeometrie erstellt. Erster Teil des Versuchs ist die einmalige Fahrt und die Interpretation der Messergebnisse. Im folgenden Video wird der Versuchsablauf vorgestellt.
Verarbeitung der Messdaten für die Erstellung der Raumkarte
Erst müssen die 1-D Distanz-Messdaten aus den Sensoren in das Inertialsystem transformiert werden. Somit werden Punkte im Inertialsystem gewonnen, mit denen Abschätzungen über die die 2-D-Raumkarte gemacht werden können. Dabei werden die Wahrscheinlichkeiten bzw. die Varianzen der ermittelten Punkte berechnet, um die höchstwahrscheinliche Raumkarte abschätzen und nachkorrigieren zu können. Zu diesem Zweck dienen die Hilfsmittel wie vor allem Bayessches Theorem und Kalman Filter, mit denen die Wahrscheinlichkeiten der Messpunkte abgeschätzt und im Algorithmus abgespeichert werden, siehe SlamChoset, SlamSiegwarth.
Das Kalman-Filter kann für die Erstellung der Raumkarte mit mehreren Datenquellen verwendet werden (Sensor Fusion). In dem Quellcodverzeichnis befindet sich eine Beispiel-Implementierung für Kalman-Filter als Python-Code.
Tauglichkeit der Ultraschalltechnik als Haupt-Mappingsystem
Die Ultraschalltechnik ist bei zahlreichen Anwendungen eingesetzt auch als Distanzsensoren. Im Folgenden wird die Tauglichkeit dieser Technik für vorliegende Anwendung, der Indoor-SLAM-Roboter beurteilt.
Die Ultraschallsensoren charaktersieren sich in der Anwendung als Haupt-Mappingsystem mit folgenden Eigenschaften
– Großer Öffnungskegel der Ultraschallwellen
– Interferenz der Ultraschallwellen
– Ablenkung der Ultraschallwellen nach der Reflektion
– Geschwindigkeit der Ultraschallwellen / Abtastfrequenz
+ Niedriger Beschaffungspreis
Die Ultraschalltechnik bietet eine sehr günstige Möglichkeit, Distanzen bis zu  zu messen. In Großserie kosten die Sensormodule deutlich unter 1USD.
zu messen. In Großserie kosten die Sensormodule deutlich unter 1USD.
– Großer Öffnungskegel der Wellen
Die Öffnungswinkel der Wellen aus Ultraschalltransmitter beträgt bei HC-SR04  bis über
bis über  . Das ist eine fataler Nachteil dieser Technik gegenüber manchen anderen optischen Messmethoden. Die Auflösung sinkt deutlich mit der steigenden Entfernung. Die Varianz beträgt bei einer Entfernung von demnach
. Das ist eine fataler Nachteil dieser Technik gegenüber manchen anderen optischen Messmethoden. Die Auflösung sinkt deutlich mit der steigenden Entfernung. Die Varianz beträgt bei einer Entfernung von demnach  , die im 2D-Raum auf einem Kreisbogen des Schallkegels dargestellt werden kann.
, die im 2D-Raum auf einem Kreisbogen des Schallkegels dargestellt werden kann.
Diese Eigenschaft ist wiederrum vorteilhaft bei der Kollisionsverhinderung, wo ein breites Abtasten erforderlich ist. Daher stellt der Sensor eine gute Möglichkeit als Kollisionsverhinderungssensor dar.
– Interferenz der Ultraschallwellen
Das bei diesem Versuch verwendete Ultraschallsensormodul HC-SR04 ist ein nicht-konfigurierbares analoges Modul. Es schickt voreingestellt  Sequenzen mit
Sequenzen mit  . Somit können sich die Wellen, besonders bei nah-positionierten Sensoren, interferieren. Um diese Problematik umzugehen, müssen die Ultraschall-Impulse kodiert werden. Dies erfordert zusätzliche und ggf. teurere Elektronik
. Somit können sich die Wellen, besonders bei nah-positionierten Sensoren, interferieren. Um diese Problematik umzugehen, müssen die Ultraschall-Impulse kodiert werden. Dies erfordert zusätzliche und ggf. teurere Elektronik
– Ablenkung der Ultraschallwellen nach der Reflektion
Die Ultraschallwellen können an schrägen oder sonstigen ungünstigen reflektierenden Oberflächen bzw. Objekten abgelenkt werden, sodass die Wellen entweder nicht an den Empfänger zurückkehren oder abgeschwächt werden. In dem Versuch zeigten sich die Messdaten bei den Objekten, die dem Sensor schräger als  stehen, als unbrauchbar. Dazu gehören auch verschiedene Kanten, die der Roboter schräg messen muss. Das stellt auch einen bedeutenden Nachteil dar, da die Räume und Objekte in der Praxis viel komplizierter und ungünstiger sein können.
stehen, als unbrauchbar. Dazu gehören auch verschiedene Kanten, die der Roboter schräg messen muss. Das stellt auch einen bedeutenden Nachteil dar, da die Räume und Objekte in der Praxis viel komplizierter und ungünstiger sein können.
– Geschwindigkeit der Ultraschallwellen / Abtastfrequenz
Die Geschwindigkeit der Ultraschallwellen beträgt in der Luft  und stellt ebenso ein großes Hindernis in der Verwendung als Haupt-Mappingsystem dar, es eine maßgebende Beschränkung für die Abtastfrequenz ist. Im Versuch zeigten sich Abtastfrequenzen über
und stellt ebenso ein großes Hindernis in der Verwendung als Haupt-Mappingsystem dar, es eine maßgebende Beschränkung für die Abtastfrequenz ist. Im Versuch zeigten sich Abtastfrequenzen über  als suboptimal, da die Messfehler bei niedrigeren Leerlaufzeiten drastisch zunehmen.
als suboptimal, da die Messfehler bei niedrigeren Leerlaufzeiten drastisch zunehmen.
Bei niedrigen Abtastfrequenzen muss das Beobachtermodell auch präziser definiert werden. Zwar bei einem bewegenden Roboter wird die Lage des Roboters beim Aussenden und Empfangen der Wellen unvernachlässigbar unterschiedlich sein. Dieses Phänomen muss im Modell ebenso berücksichtigt werden.
Zusammenfassung
Aufgrund seinem günstigen Beschaffungspreis ist Ultraschallsensor eine interessante Technik, um kurze Distanzen bis zu zu messen. Als zuverlässiges Haupt-Mappingsystem ist sie aufgrund der Breite und die Geschwindigkeit der Ultraschallwellen eher ungeeignet. Dennoch bietet er eine interessante Möglichkeit als Kollisionsverhinderungssensor an.
Ausblick
Die optischen Methoden, wie 1D-Laserentfernungsmessungen, die auf Triangulationsprinzip beruhen, sind für die 2D-Kartenerstellung geeigneter und ist der aktuelle Fokuspunkt der Entwicklung des Ropi. Ein weiterer Entwicklunsgegenstand ist der Mapping-Algorithmus auf der Basis von Kalman-Filter.
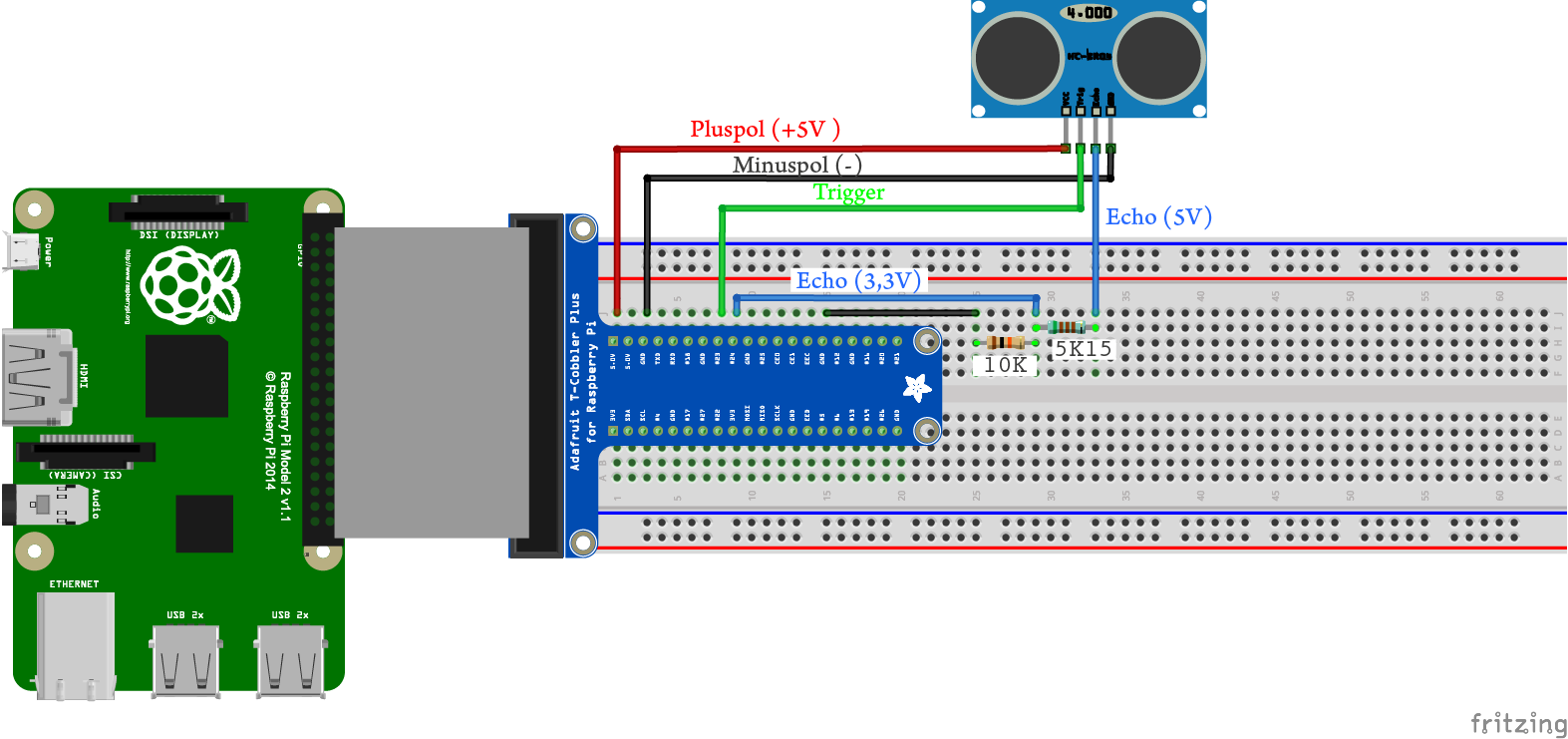
 Spannung an Trigger gelegt. Danach sendet er über Transmitter acht Rechteck-Zyklen Ultraschall-Wellen mit
Spannung an Trigger gelegt. Danach sendet er über Transmitter acht Rechteck-Zyklen Ultraschall-Wellen mit  . Die Input Pins von Raspberry Pi können eine maximale Spannung von
. Die Input Pins von Raspberry Pi können eine maximale Spannung von  erfassen. Daher muss die Ausgangsspannung mit einem
erfassen. Daher muss die Ausgangsspannung mit einem  betragen. Das muss bei der Widerstandsauswahl berücksichtigt werden. Die Widerstände der Spannungsteiler können nach
betragen. Das muss bei der Widerstandsauswahl berücksichtigt werden. Die Widerstände der Spannungsteiler können nach

 als
als  gewählt wird, soll demnach der Pullup-Widerstand
gewählt wird, soll demnach der Pullup-Widerstand  betragen. Der Spannungsteiler mit handelsüblichen
betragen. Der Spannungsteiler mit handelsüblichen  und
und  Widerständen gibt in Praxis mit Verlustwiderständen am Echo eine Ausgangsspanung von
Widerständen gibt in Praxis mit Verlustwiderständen am Echo eine Ausgangsspanung von  . Das ist in dem sicheren Bereich der empfohlenen Eingangsspannung für Raspberry Pi.
. Das ist in dem sicheren Bereich der empfohlenen Eingangsspannung für Raspberry Pi. empfohlen. Die Leerlaufzeit zwischen den Zyklen variiert je nach Anwendung und Messbereich. Die empfohlene Zeit von
empfohlen. Die Leerlaufzeit zwischen den Zyklen variiert je nach Anwendung und Messbereich. Die empfohlene Zeit von  nachhallen und die Receiver störanfälliger werden. Als akzeptabel haben sich die Leerlaufzeiten von ab
nachhallen und die Receiver störanfälliger werden. Als akzeptabel haben sich die Leerlaufzeiten von ab  herausgestellt. Dieser Umstand reduziert die Abtastfrequenz drastisch.
herausgestellt. Dieser Umstand reduziert die Abtastfrequenz drastisch. 
 -Richtung eine deutliche Drifting hat. Zudem dreht sich der Kreis nach Links. Dies entsteht durch die besonders hohe Abweichungen in der Winkelberechnung durch die reine Odometrie, siehe dafür Teil
-Richtung eine deutliche Drifting hat. Zudem dreht sich der Kreis nach Links. Dies entsteht durch die besonders hohe Abweichungen in der Winkelberechnung durch die reine Odometrie, siehe dafür Teil 
 -Position und die Orientierung können nach der Kalibrierungsschleife als Abweichung vom Ausgangszustand gemessen werden. Es wäre auch möglich z.B. optisch durch eine Kamera die komplette Fahrt aufzunehmen und vergleichen, nur für die Kalibrierung bzw. die Beobachtung der summierenden Phänomenen reicht auch der Vergleich vom End- und Ausgangszustand.
-Position und die Orientierung können nach der Kalibrierungsschleife als Abweichung vom Ausgangszustand gemessen werden. Es wäre auch möglich z.B. optisch durch eine Kamera die komplette Fahrt aufzunehmen und vergleichen, nur für die Kalibrierung bzw. die Beobachtung der summierenden Phänomenen reicht auch der Vergleich vom End- und Ausgangszustand.
 im Bereich von
im Bereich von  in
in  .
.
 die Stellgröße
die Stellgröße  . Hierbei ist die Regelgröße die IST-Position des Roboters
. Hierbei ist die Regelgröße die IST-Position des Roboters


![\begin{equation*} \mathbf{u}(t)=\mathbf{K}_P^T[\mathbf{e}(t)+\mathbf{T}_V\frac{d}{dt}\mathbf{e}(t)] \end{equation*}](http://cankosar.com/wp-content/ql-cache/quicklatex.com-d35b2d72f1bf88ef529d0dc53a04b3c1_l3.png "Rendered by QuickLaTeX.com")
 der Verstärkungsvektor und der
der Verstärkungsvektor und der  die Zeitkonstante ist, die das D-Glied parametrisiert. Die Stellgrößen, die hierbei eingestellt werden, sind die Spannungen der beiden Motoren
die Zeitkonstante ist, die das D-Glied parametrisiert. Die Stellgrößen, die hierbei eingestellt werden, sind die Spannungen der beiden Motoren
![\begin{equation*} \mathbf{T}_1\frac{d}{dt}\mathbf{u}(t)+\mathbf{u}(t)=\mathbf{K}_P^T[\mathbf{e}(t)+\mathbf{T}_V\frac{d}{dt}\mathbf{e}(t)]\text{,} \end{equation*}](http://cankosar.com/wp-content/ql-cache/quicklatex.com-dce22f4c089230161eb0db082892dbf8_l3.png "Rendered by QuickLaTeX.com")
 für die Verzögerungszeitkonstante steht. Die Bewegungsgleichungen des Roboters lassen sich i.a. als
für die Verzögerungszeitkonstante steht. Die Bewegungsgleichungen des Roboters lassen sich i.a. als
 die Massenmatrix,
die Massenmatrix,  die Dämpfungsmatrix,
die Dämpfungsmatrix,  Steifigkeitsmatrix und
Steifigkeitsmatrix und  die Matrix der äußeren Kräfte sind. Um die Bewegungsgleichungen als differentielle Gleichungen ersten Grades zu beschreiben, werden diese im Zustandraum dargestellt. Die Zustandsgleichung lautet i.a.
die Matrix der äußeren Kräfte sind. Um die Bewegungsgleichungen als differentielle Gleichungen ersten Grades zu beschreiben, werden diese im Zustandraum dargestellt. Die Zustandsgleichung lautet i.a.


 als
als
 als
als
 länger ist, als das Auto.
länger ist, als das Auto. . Der Gyrometersensor MPU6050, der hierzu verwendet wird, ist ein kostengünstiger Sensor. Er misst die Drehgeschwindigkeit und lineare Beschleunigungen in allen
. Der Gyrometersensor MPU6050, der hierzu verwendet wird, ist ein kostengünstiger Sensor. Er misst die Drehgeschwindigkeit und lineare Beschleunigungen in allen  Raumrichtungen, siehe
Raumrichtungen, siehe  Raumrichtungen, tritt das Problem auf, dass bei der Formulierung der Rotation alle
Raumrichtungen, tritt das Problem auf, dass bei der Formulierung der Rotation alle  halten, was für vorliegende Anwendung eine ausreichende Fehlerentwicklung darstellt. Als Vergleich: Bei der Messung der Rotation in allen 3 Raumrichtungen und Formulierung durch Quaternionen beträgt die Drifting um die obengenannte Achse deutlich über
halten, was für vorliegende Anwendung eine ausreichende Fehlerentwicklung darstellt. Als Vergleich: Bei der Messung der Rotation in allen 3 Raumrichtungen und Formulierung durch Quaternionen beträgt die Drifting um die obengenannte Achse deutlich über  .
.
 wird hierbei sowohl aus den Odometern konstruiert als auch aus dem Gyrometer akquiriert. Da die von der Sensorik akquirierten Daten keine absoluten Wahrheiten wiedergeben, wird hierbei von der Wahrscheinlichkeit der Daten bzw. einer „Schätzung“ (Prediction) des Systemzustands gesprochen. Hierbei erhält der Algorithmus mehrere ggf. voneinander abweichende Informationen über den Systemzustand. Er muss demnach den optimalsten bzw. den wahrscheinlichsten Systemzustand schätzen. Hierzu gibt es ebenfalls zahlreiche Studien und Ansätze, wie z.B.
wird hierbei sowohl aus den Odometern konstruiert als auch aus dem Gyrometer akquiriert. Da die von der Sensorik akquirierten Daten keine absoluten Wahrheiten wiedergeben, wird hierbei von der Wahrscheinlichkeit der Daten bzw. einer „Schätzung“ (Prediction) des Systemzustands gesprochen. Hierbei erhält der Algorithmus mehrere ggf. voneinander abweichende Informationen über den Systemzustand. Er muss demnach den optimalsten bzw. den wahrscheinlichsten Systemzustand schätzen. Hierzu gibt es ebenfalls zahlreiche Studien und Ansätze, wie z.B. 

 abzuschätzen. Somit sieht das Kreisbogen-Modell wie in der Abbildung 2.
abzuschätzen. Somit sieht das Kreisbogen-Modell wie in der Abbildung 2.


 Inkrementenanzahl,
Inkrementenanzahl,  die IST-Verschiebung (radial oder linear) und
die IST-Verschiebung (radial oder linear) und  eine Spaltbreite (ebenso radialoder linear) ist. In unserem Fall handelt es sich um einen Low-Budget Drehinkrementgeber (Drehencoder) mit
eine Spaltbreite (ebenso radialoder linear) ist. In unserem Fall handelt es sich um einen Low-Budget Drehinkrementgeber (Drehencoder) mit  Spalten. Eine Spaltbreite beträgt demnach
Spalten. Eine Spaltbreite beträgt demnach  und wir haben insgesamt eine Auflösung von
und wir haben insgesamt eine Auflösung von  . Wichtig zu beachten ist, dass es sich hier nicht um einen Fehler handelt, sondern die Auflösung. Die Abweichungen werden nicht addiert.
. Wichtig zu beachten ist, dass es sich hier nicht um einen Fehler handelt, sondern die Auflösung. Die Abweichungen werden nicht addiert. ,
,  ,
,  ,
,  und daraus Radiusintervall des Drehkreises
und daraus Radiusintervall des Drehkreises  ,
,  berechnet.
berechnet. – Wahrscheinlichkeit und eine unendlich hohe Auflösung haben, kann der Radius des Drehkreises einen beliebigen Wert zwischen
– Wahrscheinlichkeit und eine unendlich hohe Auflösung haben, kann der Radius des Drehkreises einen beliebigen Wert zwischen
 . Auch dieser Ansatz erweist sich für diese Anwendung brauchbar, weil die unsystematischen Fehler hoch sind und die systematischen Fehler überdecken, siehe
. Auch dieser Ansatz erweist sich für diese Anwendung brauchbar, weil die unsystematischen Fehler hoch sind und die systematischen Fehler überdecken, siehe  macht, siehe Abbildung 1. In der Abbildung sind die Drehungen in die lineare Bewegung, in dem Fall Kreisbogen, übersetzt und in differentieller Schreibweise als
macht, siehe Abbildung 1. In der Abbildung sind die Drehungen in die lineare Bewegung, in dem Fall Kreisbogen, übersetzt und in differentieller Schreibweise als  und
und  gekennzeichnet. Dabei ist
gekennzeichnet. Dabei ist  die Bewegung des Roboters.
die Bewegung des Roboters.


 löst, erhält man
löst, erhält man
 benötigt. Wenn die Längen beider Bögen
benötigt. Wenn die Längen beider Bögen  und
und  bekannt sind, kann für den mittleren Bogen geschrieben werden, dass
bekannt sind, kann für den mittleren Bogen geschrieben werden, dass

 als
als



 führt in den obigen Formeln zu einer Nulldivision. Im Prinzip ist dieser Fall durch
führt in den obigen Formeln zu einer Nulldivision. Im Prinzip ist dieser Fall durch
